
Kinderen van een hooguit twee jaar oud doen het het speels gemak. En toch is rennen alles behalve makkelijk. Daar zijn wetenschappers al tientallen jaren achter. Wetenschappers van de Technische Universiteit in Delft ontwikkelden de afgelopen jaren hun eerste rennende robot. Daarmee kan de menselijke renbeweging worden onderzocht. Dat kan leiden tot betere protheses.
Mede verantwoordelijk voor de ontwikkeling van de rennende robot Phides is Daniël Karssen. Hij is onderzoeker binnen het Biorobotics Lab van de vakgroep Biomechanical Engineering en promoveerde recentelijk op zijn onderzoek naar de menselijke renbeweging. Phides hielp hem bij zijn onderzoek.
“Lopende of rennende robots hebben gemakkelijk last van oneffenheden in de vloer”, zegt Karssen. “Hoe goed ze daarmee om gaan noemen we het verstoringsgedrag. Ik heb met Phides onderzocht welke eigenschappen helpen om robot op de been te houden. Dat kan uiteindelijk belangrijke informatie opleveren over het menselijke verstoringsgedrag.”
http://www.youtube.com/watch?v=ODYzmBNprp0
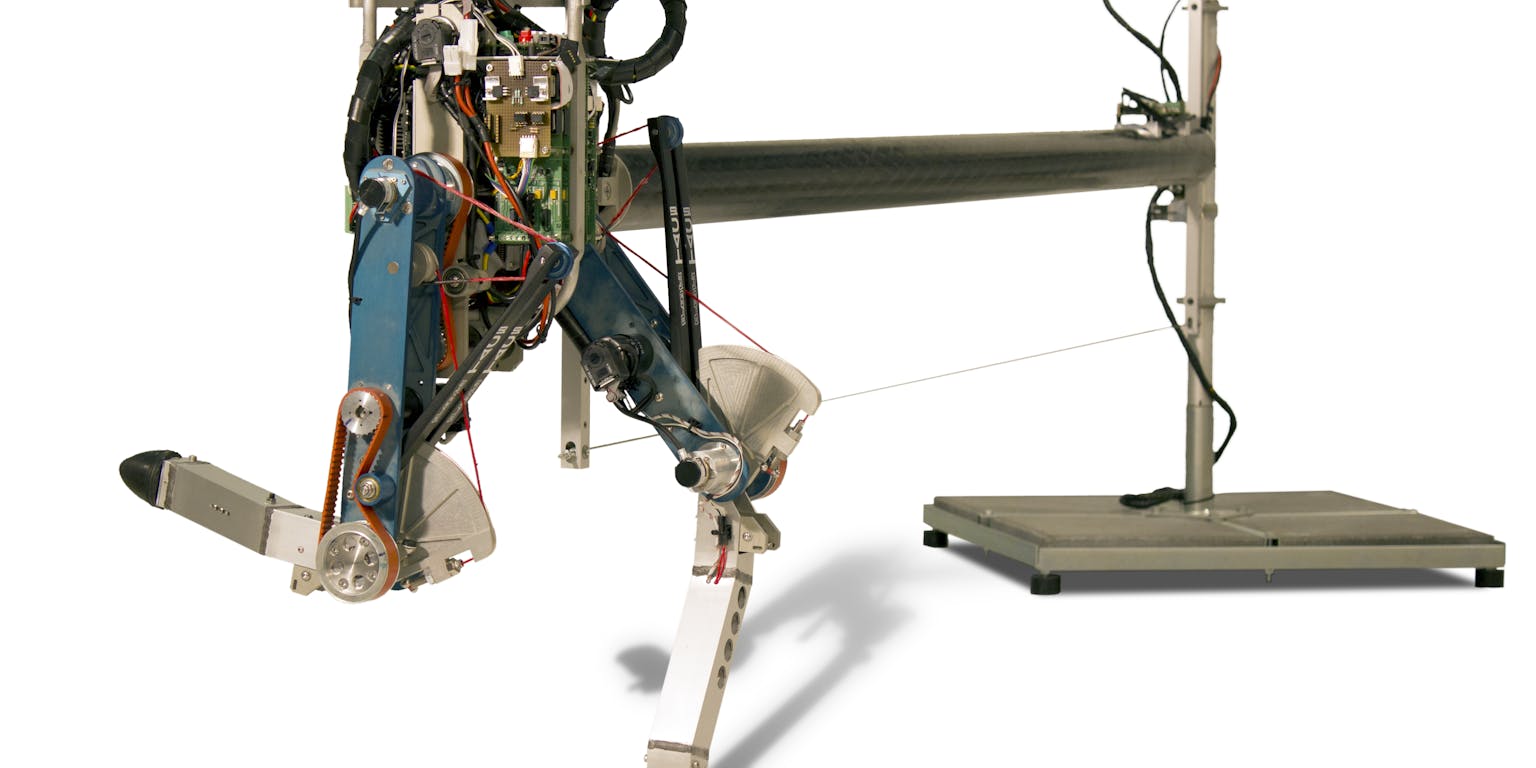
De Delftse robot Phides in actie.
Het maken van een rennende robot stelt hoge eisen aan de constructie en motoren, aldus Karssen. Het kost in vergelijking tot lopen veel meer energie. Om rennen mogelijk te maken maakt Phides gebruik van veren in zijn benen. Karssen ontdekte dat de stabielste robot rent op veren waarbij het in eerste instantie veel kracht kost ze in te drukken, maar het laatste stuk juist weer makkelijker gaat. “Zo’n zogenoemd niet-lineair veerprofiel gaf Phides meer stabiliteit. Waarom precies? Dat weten we eigenlijk niet”, zegt Karssen. “Dat is één van de vragen die nog open staat na mijn onderzoek.”
Ook werd er naar de invloed van het zwaartepunt van Phides gekeken. Veel lopende robots hebben het zwaartepunt van het bovenlichaam precies op de heup liggen. Dat blijkt niet ideaal te zijn, ontdekte Karssen. Het opvangen van verstoringen kan tot wel tien keer beter gaan als het zwaartepunt net boven of onder de heup ligt, afhankelijk van de soort verstoringen waarmee de robot te maken krijgt.
Tot slot onderzocht Karssen in hoeverre het door- en terugzwaaien van het been tijdens het rennen gunstig is voor de stabiliteit. “Bij rennende mensen wordt gezien dat ze hun benen eigenlijk iets ‘te ver’ doorzwaaien naar voren,” zegt Karssen.
“De voet raakt de grond pas als het been al weer terug aan het gaan is. Met simpele computermodellen is in het verleden aangetoond dat dit inderdaad gunstig is voor de stabiliteit. Maar uit mijn onderzoek blijkt dat dit niet meer klopt op het moment dat het met een complexer en vollediger model wordt nagedaan. Waarschijnlijk zwaaien mensen hun benen dan ook door om een andere reden. Welke is nog niet duidelijk.”
Valsspelen onmogelijk
Het onderzoek van Karssen leunt niet alleen op resultaten van Phides. Sterker nog, de meeste resultaten werden uit een computermodel gehaald. Daarin werden bewegingen van renners gesimuleerd. Maar volgens Karssen is het belangrijk dat dergelijke resultaten worden geverifieerd met een robot. Dat maakt de resultaten uit het model betrouwbaarder.
“Met een simulatie op de computer kunnen we eigenlijk vals spelen”, zegt Karssen. “Je kunt bijvoorbeeld bepaalde effecten buiten beschouwing laten die in het echt misschien wel een rol spelen. Met een robot kunnen we achterhalen wat we zijn vergeten in onze simulaties.”

Phides is 80 centimeter hoog en weegt 13,5 kilo. Hij is verbonden met een boomconstructie die hem overeind houdt.
TU DelftRobots voor onderzoek aan de mens
Maar waarom hebben we eigenlijk robots nodig voor onderzoek dat uiteindelijk over menselijke bewegingen gaan? Is het niet veel logischer daar ook mensen voor te gebruiken? “Nou, robots hebben een aantal grote voordelen ten opzichte van mensen bij bewegingsonderzoek”, zegt Karssen. “Bij echte proefpersonen hebben we veel minder controle. Je kunt bijvoorbeeld niet aan iemand vragen om een beweging exact te herhalen, maar dan met 10 procent minder kracht. Dat kun je een robot wel laten doen.”
Ook laat Karssen weten dat wetenschappers graag meer willen weten over de renbeweging van mensen omdat echt fundamentele kennis daarover ontbreekt. Kennis die erg waardevol kan zijn bij het maken van protheses. Het ontwikkelen daarvan is nu vaak een kwestie van ontwerpen, uitproberen en weer terug naar de tekentafel gaan.
Broertjes van Phides
Al tientallen jaren wordt er onderzoek gedaan naar lopende robots en nog steeds rennen er geen machines door de straten heen. Karssen weet wel hoe dat komt. “Lopende en rennende robots vragen het uiterste van wat technisch mogelijk is. En dat vindt momenteel nog in het laboratorium plaats.”
Er zijn wel enkele broertjes van Phides. Lopende en zelfs rennende robots. Zo is daar MABEL, die qua bouw erg veel op Phides lijkt maar nog een stukje groter is. Ook ASIMO heeft de wereld al een paar keer versteld doen staan met zijn ogenschijnlijk soepele en menselijke bewegingen. “Maar het rennen van ASIMO lijkt niet op de bewegingen van Phides of een mens”, zegt Karssen. “Als je goed kijkt dan zie je dat hij nauwelijks van de grond komt tijdens het rennen. Dat doen mensen zeer zeker.”
Steeds sneller
Karssen is klaar met zijn promotie. Hoe gaat het onderzoek in Delft verder? “Waarschijnlijk zullen er de komende jaren nog een aantal robots zoals Phides gebouwd gaan worden”, denkt Karssen. “Zij zullen allemaal gebruikt worden voor onderzoek naar de renbeweging. Het zal overigens nog een grote uitdaging zijn om uiteindelijk de boomconstructie overbodig te maken. Dan heb je echt een vrij rennende robot.
De resultaten van mijn onderzoek zullen in eerste instantie nuttig zijn voor bewegingswetenschappers. Zij kunnen het uiteindelijk toepassen bij het maken van betere protheses. Zo kunnen mensen met een prothese uiteindelijk gewoon meedoen met sportwedstrijden. Dat gebeurt nu al. Mijn voorspelling is dat zij net zo lang mee mogen doen totdat ze zo’n goede protheses hebben dat ze sneller worden dan hun prothese-loze collega’s.”
Zie ook:
- Top 5 Robots – Wetenschap24